鲸鱼优化算法WOA及求解函数应用(含代码,简单易懂) |
您所在的位置:网站首页 › 鲸鱼 GoPro › 鲸鱼优化算法WOA及求解函数应用(含代码,简单易懂) |
鲸鱼优化算法WOA及求解函数应用(含代码,简单易懂)
|
一、介绍
鲸鱼优化算法(WOA)是 2016 年由澳大利亚格里菲斯大学的 Mirjalili 等提出的一种新的群体智能优化算法,其参数量较少,收敛速度很快且容易实现。 鲸鱼优化算法的灵感来源于座头鲸的特殊捕食方式,这种捕食方式被称为“发泡网觅食法”。座头鲸喜欢在靠近水面的位置捕食磷虾和小鱼,座头鲸通过图中所示的圆形或“9”字型路径制造特殊的气泡来完成。研究人员发现了两种与气泡相关的动作,即“向上螺旋”和“双环”。在“向上螺旋”时,座头鲸潜入水底12米左右,开始在猎物周围形成螺旋形的气泡,然后游向水面。而“双环”动作又分为“珊瑚环”、“挑尾”和“捕获环”。  二、数学模型及算法
二、数学模型及算法
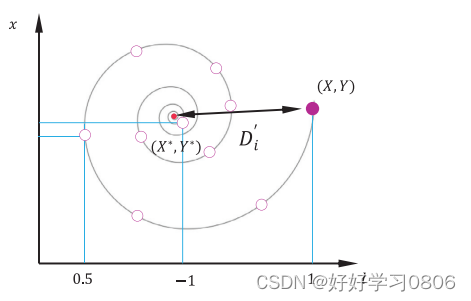
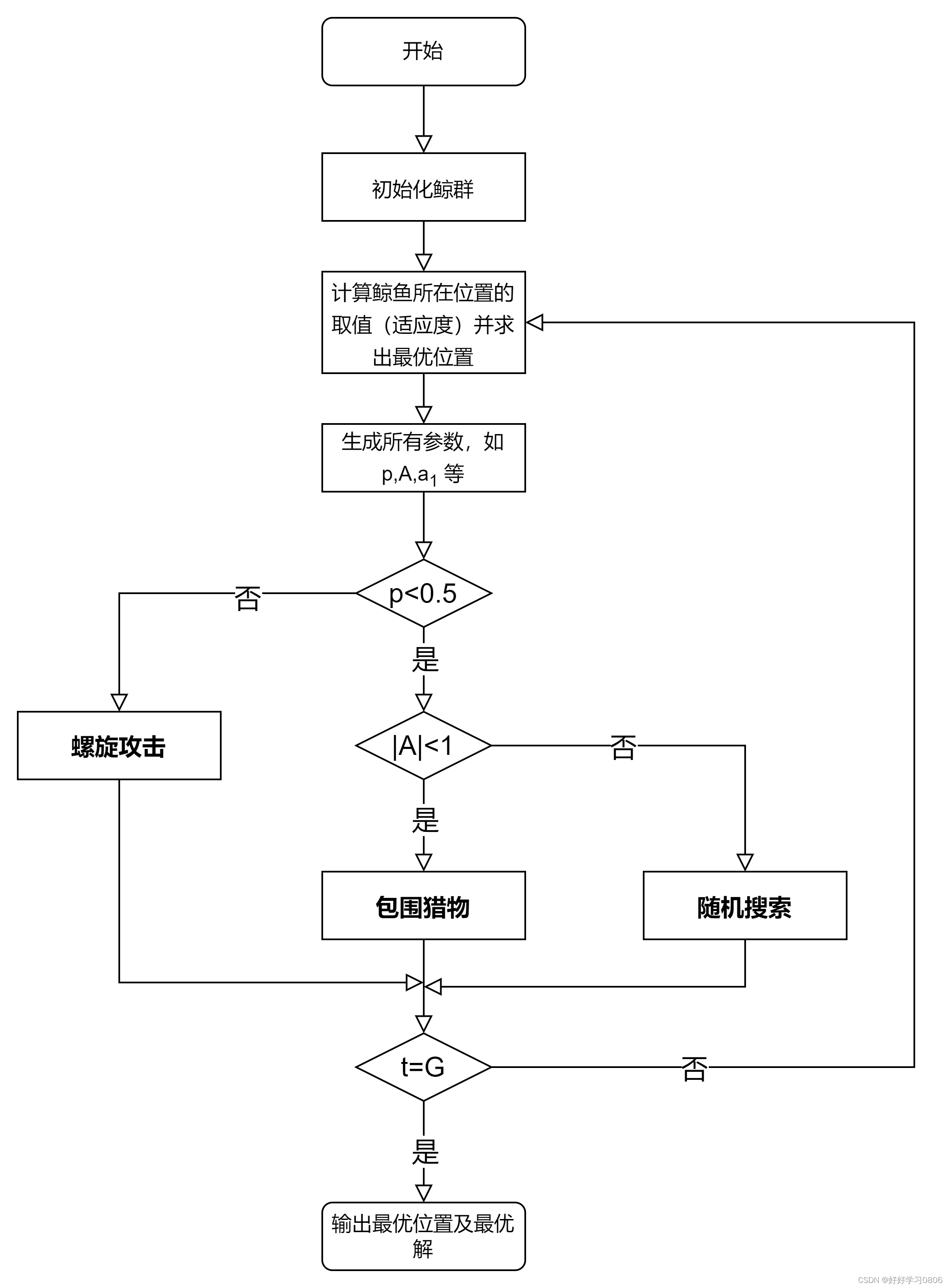
总体来说,鲸鱼优化算法由三部分动作组成:包围猎物、螺旋攻击猎物(发泡网攻击)、随机搜索猎物。下面分别阐述三种动作的数学模型。 2.1 包围猎物WOA算法将当前最优候选解做为目标猎物(最优解),在知道猎物位置后鲸群开始根据当前自身与猎物位置的关系更新位置。这种行为用以下公式表示: 上述式子中, 其中, 其中G表示迭代总次数。 2.2 螺旋攻击为模拟座头鲸的螺旋过程,也就是发泡网攻击过程,我们在鲸鱼与猎物之间建立一种螺旋方程,模拟座头鲸的螺旋状运动,其公式及示意图如下: 其中, 其中
包围猎物和螺旋攻击,这两种行为的选择是通过随机的方式选择的,当概率 可以自由调整概率及对应行为,原论文是以0.5为概率。 2.3 随机搜索随机搜索是WOA中用于全局搜索,跳出局部最优的方式,其数学表示为: 其中,
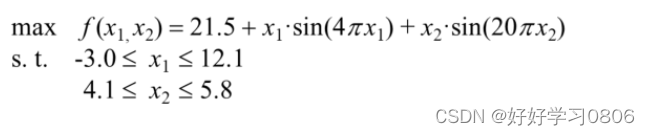
求解二元函数的最大值,函数表达式为:
|
【本文地址】